







ក្បួនខាងឆ្វេង, ក្បួនស្ដាំ, ក្បួនវីសស្ដាំ។ក្បួនខាងឆ្វេងនេះគឺជាមូលដ្ឋានសម្រាប់ការវិភាគនៃកម្លាំងនៃការបង្វិលម៉ូទ័រ។និយាយឱ្យសាមញ្ញវាគឺជាចំហាយដែលផ្ទុកបច្ចុប្បន្ននៅក្នុងដែនម៉ាញ៉េទិចដែលនឹងត្រូវបានប៉ះពាល់ដោយកម្លាំង។
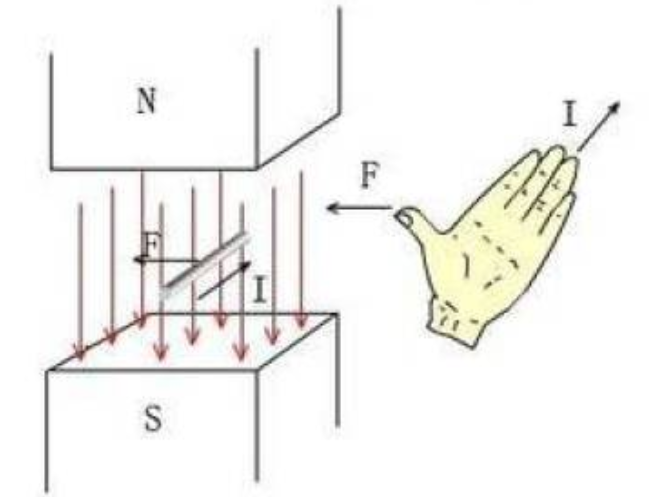
អនុញ្ញាតឱ្យបន្ទាត់ដែនម៉ាញេទិកឆ្លងកាត់ផ្នែកខាងមុខនៃបាតដៃ ទិសដៅនៃម្រាមដៃគឺជាទិសដៅនៃចរន្ត ហើយទិសដៅនៃមេដៃគឺជាទិសដៅនៃកម្លាំងម៉ាញេទិក។កម្លាំងអូសទាញកាត់ខ្សែដែនម៉ាញេទិចដើម្បីបង្កើតកម្លាំងអេឡិចត្រូម៉ូទ័រ។
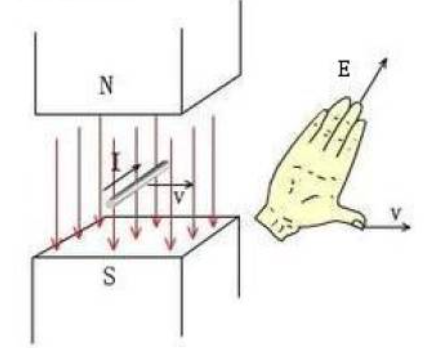
អនុញ្ញាតឱ្យខ្សែបន្ទាត់ដែនម៉ាញេទិចឆ្លងកាត់បាតដៃ ទិសដៅនៃមេដៃគឺជាទិសដៅនៃចលនា ហើយទិសដៅនៃម្រាមដៃគឺជាទិសដៅនៃកម្លាំងអេឡិចត្រូម៉ូទ័រដែលបានបង្កើត។ហេតុអ្វីបានជានិយាយអំពីកម្លាំងអេឡិចត្រូម៉ូទ័រ?ខ្ញុំមិនដឹងថាតើអ្នកមានបទពិសោធន៍ស្រដៀងគ្នានេះទេ។នៅពេលអ្នកបញ្ចូលគ្នានូវខ្សភ្លើងបីដំណាក់កាលនៃម៉ូទ័រ ហើយបង្វែរម៉ូទ័រដោយដៃ អ្នកនឹងឃើញថា ធន់នឹងធំណាស់។នេះគឺដោយសារតែ induction កើតឡើងកំឡុងពេលបង្វិលម៉ូទ័រ។កម្លាំងអេឡិចត្រូម៉ូទ័របង្កើតចរន្ត ហើយចរន្តដែលហូរកាត់ conductor ក្នុងដែនម៉ាញេទិកនឹងបង្កើតកម្លាំងមួយទល់មុខនឹងទិសដៅនៃការបង្វិល ហើយអ្នកគ្រប់គ្នានឹងមានអារម្មណ៍ថាមានភាពធន់នឹងការបង្វិលច្រើន។
ខ្សភ្លើងបីដំណាក់កាលត្រូវបានបំបែកហើយម៉ូទ័រអាចបត់បានយ៉ាងងាយស្រួល
ខ្សែបីដំណាក់កាលត្រូវបានបញ្ចូលគ្នាហើយភាពធន់នៃម៉ូទ័រមានទំហំធំណាស់។យោងទៅតាមក្បួនវីសខាងស្តាំ សង្កត់សូលុយស្យុងដែលមានថាមពលដោយដៃស្តាំ ដើម្បីឱ្យម្រាមដៃទាំងបួនកោងក្នុងទិសដៅដូចគ្នាទៅនឹងចរន្ត បន្ទាប់មកចុងចង្អុលដោយមេដៃគឺជាបង្គោល N នៃសូលុយស្យុងដែលមានថាមពល។
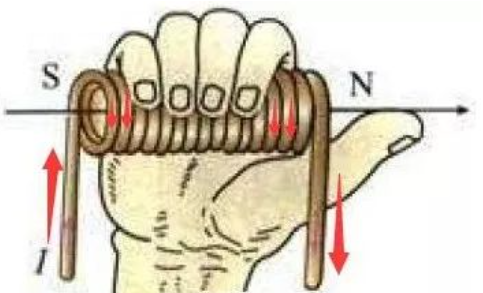
ក្បួននេះគឺជាមូលដ្ឋានសម្រាប់ការវិនិច្ឆ័យបន្ទាត់រាងប៉ូលនៃឧបករណ៏ថាមពលហើយទិសដៅនៃព្រួញក្រហមគឺជាទិសដៅបច្ចុប្បន្ន។បន្ទាប់ពីបានអានច្បាប់ទាំងបីហើយ ចូរយើងពិចារណាអំពីគោលការណ៍ជាមូលដ្ឋាននៃការបង្វិលម៉ូទ័រ។ផ្នែកទី 1: គំរូម៉ូទ័រ DC យើងរកឃើញគំរូនៃម៉ូទ័រ DC ដែលត្រូវបានសិក្សានៅក្នុងរូបវិទ្យាវិទ្យាល័យ ហើយធ្វើការវិភាគសាមញ្ញតាមរយៈវិធីសាស្ត្រវិភាគសៀគ្វីម៉ាញ៉េទិច។
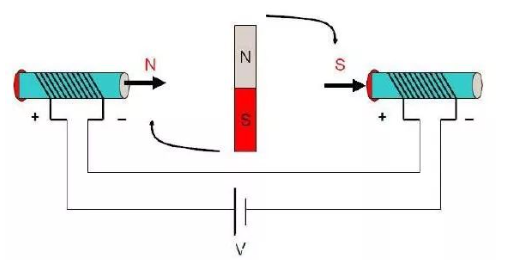
ស្ថានភាពទី 1 នៅពេលដែលចរន្តត្រូវបានអនុវត្តទៅឧបករណ៏នៅចុងទាំងពីរ យោងទៅតាមក្បួនវីសខាងស្តាំ អាំងតង់ស៊ីតេម៉ាញ៉េទិចដែលបានអនុវត្ត B (ដូចបង្ហាញដោយព្រួញក្រាស់) នឹងត្រូវបានបង្កើត ហើយ rotor នៅកណ្តាលនឹងព្យាយាមបង្កើត ទិសដៅនៃបន្ទាត់អាំងឌុចស្យុងម៉ាញេទិកខាងក្នុងរបស់វាតាមដែលអាចធ្វើទៅបាន។ទិសដៅនៃបន្ទាត់វាលម៉ាញេទិកខាងក្រៅគឺស្របដើម្បីបង្កើតជារង្វិលជុំបន្ទាត់វាលម៉ាញេទិកបិទជិតបំផុត ដូច្នេះ rotor ខាងក្នុងនឹងបង្វិលតាមទ្រនិចនាឡិកា។នៅពេលដែលទិសដៅនៃដែនម៉ាញ៉េទិចរបស់ rotor គឺកាត់កែងទៅនឹងទិសដៅនៃដែនម៉ាញេទិកខាងក្រៅ កម្លាំងបង្វិលជុំនៃ rotor គឺធំបំផុត។ចំណាំថា "ពេល" ត្រូវបានគេនិយាយថាធំជាងគេ មិនមែន "កម្លាំង" ទេ។វាជាការពិតដែលថានៅពេលដែលវាលម៉ាញេទិករបស់ rotor ស្ថិតនៅក្នុងទិសដៅដូចគ្នាទៅនឹងដែនម៉ាញេទិកខាងក្រៅ កម្លាំងម៉ាញេទិកនៅលើ rotor គឺធំបំផុត ប៉ុន្តែនៅពេលនេះ rotor ស្ថិតនៅក្នុងស្ថានភាពផ្ដេក ហើយដៃកម្លាំងគឺ 0 ហើយនៃ ពិតណាស់វានឹងមិនបង្វិលទេ។ដើម្បីបន្ថែម ពេលនេះគឺជាផលនៃកម្លាំង និងដៃកម្លាំង។ប្រសិនបើមួយក្នុងចំណោមពួកគេគឺសូន្យនោះផលិតផលគឺសូន្យ។នៅពេលដែល rotor ងាកទៅទីតាំងផ្តេក ទោះបីជាវាលែងប៉ះពាល់ដោយកម្លាំងបង្វិលជុំក៏ដោយ វានឹងបន្តបង្វិលតាមទ្រនិចនាឡិកា ដោយសារនិចលភាព។នៅពេលនេះប្រសិនបើទិសដៅបច្ចុប្បន្ននៃ solenoids ទាំងពីរត្រូវបានផ្លាស់ប្តូរដូចដែលបានបង្ហាញនៅក្នុងរូបភាពខាងក្រោម rotor នឹងបន្តបង្វិល។បត់ទៅមុខតាមទ្រនិចនាឡិកា,
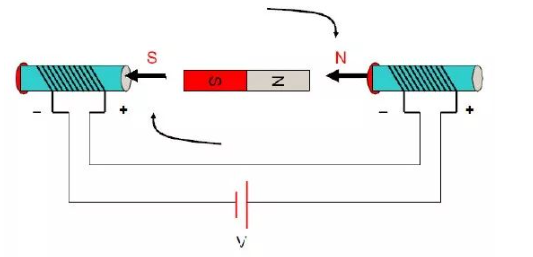
នៅក្នុងរដ្ឋទី 2 ទិសដៅបច្ចុប្បន្ននៃ solenoids ទាំងពីរត្រូវបានផ្លាស់ប្តូរជានិច្ច ហើយ rotor ខាងក្នុងនឹងបន្តបង្វិល។សកម្មភាពនៃការផ្លាស់ប្តូរទិសដៅនៃចរន្តត្រូវបានគេហៅថាការផ្លាស់ប្តូរ។ចំណាំចំហៀង៖ ពេលដែលត្រូវផ្លាស់ប្តូរគឺទាក់ទងតែទីតាំងរបស់ rotor ប៉ុណ្ណោះ ហើយមិនទាក់ទងដោយផ្ទាល់ទៅនឹងបរិមាណផ្សេងទៀតទេ។ផ្នែកទី 2: ម៉ូទ័រ rotor ខាងក្នុងពីរប៉ូលបីដំណាក់កាល ជាទូទៅ របុំបីដំណាក់កាលនៃ stator មានរបៀបភ្ជាប់ផ្កាយ និងរបៀបតភ្ជាប់ដីសណ្តរ ហើយ "របៀបពីរ-ពីរនៃការតភ្ជាប់ផ្កាយបីដំណាក់កាល" គឺជារឿងធម្មតាបំផុត ដែលត្រូវបានប្រើនៅទីនេះ។គំរូនេះត្រូវបានប្រើសម្រាប់ការវិភាគសាមញ្ញ។
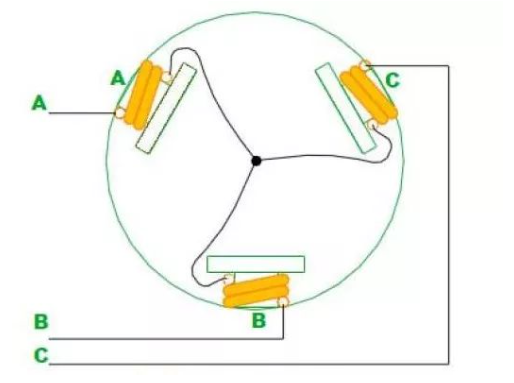
រូបភាពខាងលើបង្ហាញពីរបៀបដែលរបុំ stator ត្រូវបានភ្ជាប់ (rotor មិនត្រូវបានបង្ហាញជាមេដែកពីរប៉ូលសម្មតិកម្មទេ) ហើយរបុំបីត្រូវបានភ្ជាប់ជាមួយគ្នាក្នុងទម្រង់ "Y" តាមរយៈចំណុចតភ្ជាប់កណ្តាល។ម៉ូទ័រទាំងមូលនាំទៅបីខ្សែ A, B, C. នៅពេលដែលពួកវាត្រូវបានបញ្ចូលថាមពលពីរដោយពីរមាន 6 ករណីគឺ AB, AC, BC, BA, CA, CB ។ចំណាំថានេះជាលំដាប់។
ឥឡូវនេះខ្ញុំក្រឡេកមើលដំណាក់កាលទីមួយ៖ ដំណាក់កាល AB ត្រូវបានផ្តល់ថាមពល
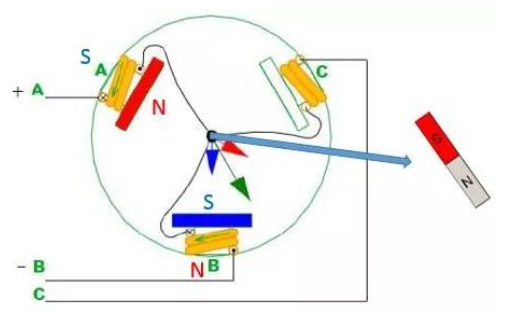
នៅពេលដែលដំណាក់កាល AB ត្រូវបានបញ្ចូលថាមពល ទិសដៅនៃបន្ទាត់ដែនម៉ាញេទិកដែលបង្កើតដោយបង្គោល A ត្រូវបានបង្ហាញដោយព្រួញក្រហម ហើយទិសដៅនៃខ្សែវាលម៉ាញេទិកដែលបង្កើតដោយបង្គោល B ត្រូវបានបង្ហាញដោយព្រួញពណ៌ខៀវ បន្ទាប់មកទិសដៅ នៃកម្លាំងលទ្ធផលត្រូវបានបង្ហាញដោយព្រួញពណ៌បៃតង បន្ទាប់មកសន្មត់ថាមានមេដែកពីរបង្គោល ទិសដៅ N-pole នឹងស្របគ្នានឹងទិសដៅដែលបង្ហាញដោយព្រួញពណ៌បៃតងយោងទៅតាម "rotor នៅកណ្តាលនឹងព្យាយាមរក្សា ទិសដៅនៃបន្ទាត់ដែនម៉ាញេទិកខាងក្នុងរបស់វាស្របជាមួយនឹងទិសដៅនៃបន្ទាត់ដែនម៉ាញេទិកខាងក្រៅ"។ចំណែក C វិញ គាត់មិនមានអ្វីពាក់ព័ន្ធនឹងគាត់ដូចពេលនេះទេ។
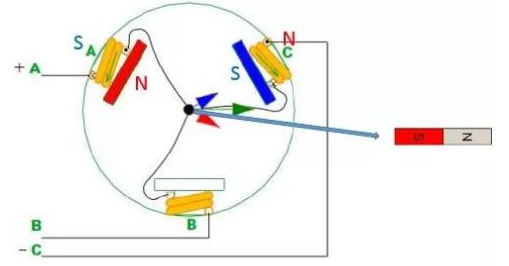
ដំណាក់កាលទី 2៖ ដំណាក់កាល AC Energized
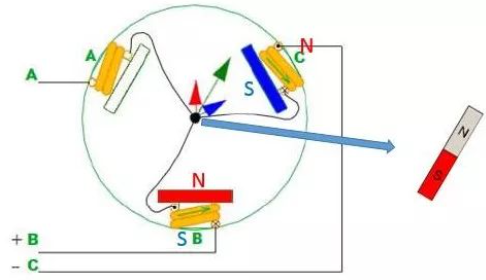
ដំណាក់កាលទីបី៖ ដំណាក់កាល BC
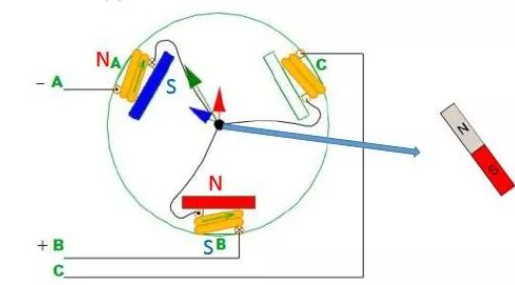
ដំណាក់កាលទីបី៖ ដំណាក់កាល BA ត្រូវបានផ្តល់ថាមពល
ខាងក្រោមនេះគឺជាដ្យាក្រាមរដ្ឋនៃមេដែកកម្រិតមធ្យម (rotor): rotor ដំណើរការនីមួយៗបង្វិល 60 ដឺក្រេ

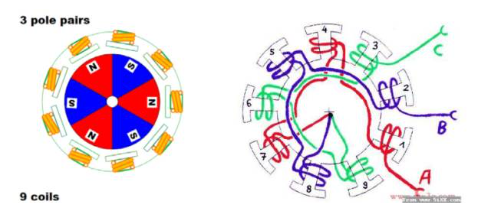
ការបង្វិលពេញលេញត្រូវបានបញ្ចប់នៅក្នុងដំណើរការចំនួនប្រាំមួយដែលក្នុងនោះការផ្លាស់ប្តូរចំនួនប្រាំមួយត្រូវបានធ្វើឡើង។ផ្នែកទីបី: ម៉ូទ័រ rotor ខាងក្នុងពហុខ្យល់បីដំណាក់កាល តោះមើលចំណុចដែលស្មុគស្មាញជាង។រូបភាព (a) គឺជាម៉ូទ័របីដំណាក់កាលប្រាំបួនខ្យល់ (បីដំណាក់កាល ប្រាំបួនខ្យល់ ប្រាំមួយបង្គោល) ។បង្គោលទល់មុខ) ម៉ូទ័រ rotor ខាងក្នុង ការតភ្ជាប់របុំរបស់វាត្រូវបានបង្ហាញក្នុងរូបភាព (ខ) ។វាអាចត្រូវបានគេមើលឃើញពីរូបភាព (ខ) ដែលរបុំបីដំណាក់កាលក៏ត្រូវបានភ្ជាប់ជាមួយគ្នានៅចំណុចមធ្យម ដែលជាការភ្ជាប់ផ្កាយផងដែរ។និយាយជាទូទៅចំនួននៃរបុំនៃម៉ូទ័រគឺមិនស៊ីគ្នានឹងចំនួនបង្គោលមេដែកអចិន្រ្តៃយ៍ (ឧទាហរណ៍ 9 windings និង 6 poles ត្រូវបានប្រើជំនួសឱ្យ 6 windings និង 6 poles) ដូច្នេះដើម្បីការពារធ្មេញរបស់ stator និង។ មេដែកនៃ rotor ពីការទាក់ទាញនិងតម្រឹម។
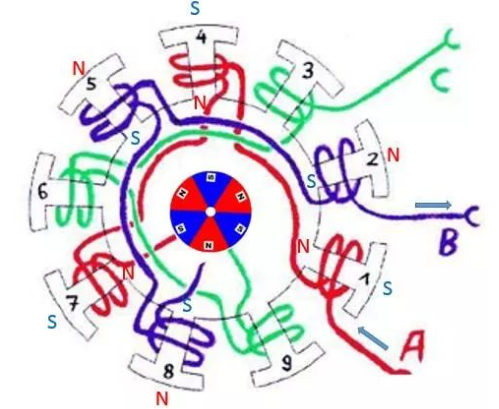
គោលការណ៍នៃចលនារបស់វាគឺ៖ បង្គោល N នៃ rotor និងបង្គោល S នៃ energized winding មានទំនោរក្នុងការតម្រឹម ហើយបង្គោល S នៃ rotor និង N pole នៃ energized winding មានទំនោរក្នុងការតម្រឹម។នោះគឺ S និង N ទាក់ទាញគ្នាទៅវិញទៅមក។ចំណាំថាវាខុសពីវិធីសាស្ត្រវិភាគពីមុន។សូមជួយអ្នកវិភាគម្ដងទៀត។ដំណាក់កាលដំបូង៖ ដំណាក់កាល AB ត្រូវបានអគ្គិសនី
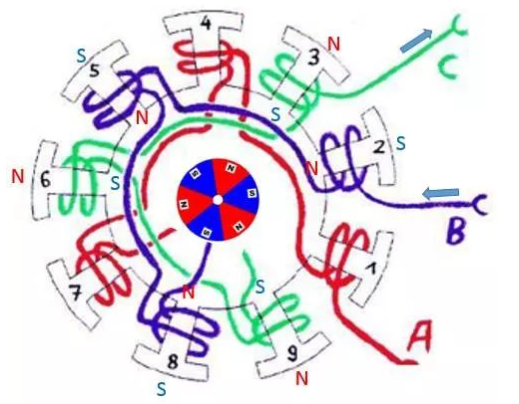
ដំណាក់កាលទី 2៖ ដំណាក់កាល AC Energized

ដំណាក់កាលទីបី៖ ដំណាក់កាល BC
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ២១ ខែតុលា ឆ្នាំ ២០២២